Start | Grundlagen | Wechselstromtechnik | Nachrichtentechnik | Digitaltechnik | Tabellen | Testaufgaben | Quiz | PDF-Dateien
Induktionsmotor
Einleitung
Ein Elektromotor wandelt elektrische Energie bzw. Leistung in mechanische Energie bzw. Leistung um. Elektromotoren erzeugen Drehbewegungen mit denen dann u.a. Haushaltsgeräte, Arbeitsmaschinen oder Fahrzeuge angetrieben werden.
In einer Vielzahl von Anwendungen werden Elektromotoren verwendet.
Hierfür gibt es zahlreiche Gründe.Hoher Wirkungsgrad: Die Umwandlung der elektrischen Energie in eine mechanische Bewegung kann sehr effizient durchgeführt werden. Das heißt es entstehen nur relativ geringe Verluste. Je nach Motortyp geht man hierbei von ca. 75 % bis 95 % Wirkungsgrad aus. Zum Vergleich, herkömmliche Verbrennungsmotore, wie sie in Kraftfahrzeugen verwendet werden, liegen bei nur ca. 20 % bis 45 %.
Lokal Emissionsfrei: Beim Betrieb von Elektromotoren entstehen, im Gegensatz zu Verbrennungsmotoren, keine Abgase am Ort des Betriebs. Daher ist auch ein problemloser Betrieb in Innenräumen möglich. Ein Anwendungsbeispiel hierfür sind Elektro-Gabelstapler, die den Materialtransport in Werkshallen durchführen. Beim Elektromotor ist außerdem die Lärmentwicklung relativ gering.
Einfacher Aufbau, einfache Wartung: Elektromotoren sind im Vergleich zu Verbrennungsmotoren wesentlich einfacher aufgebaut. Das vereinfacht die Wartung und reduziert somit die Betriebskosten.
Elektromotoren können je nach Motortyp mit Gleichstrom (DC: direct current) oder Wechselstrom (AC: alternating current) bzw. dreiphasigem Wechselstrom genannt Drehstrom betrieben werden.
Induktionsmotor
Ein sehr häufig verwendeter Motor, der mit Wechsel- bzw. Drehstrom betrieben wird, ist der Induktionsmotor, auch Asynchronmotor genannt.
Fast alle Industriemotoren sind Induktionsmotoren. Ein Induktionsmotor hat einen besonders einfachen Aufbau. Im Gegensatz zu anderen Elektromotoren benötigt er keine Bürsten, keine Kommutatorringe, keine Permanentmagnete oder Positionssensoren.
Induktionsmotoren können aus eigner Kraft mit der Drehbewegung beginnen, dies bezeichnet man als selbstlaufend.
Die Entwicklung des Induktionsmotors geht auf den Erfinder und Elektroingenieur Nikola Tesla (*1856, + 1943) zurück.
Aufbau des Induktionsmotors
Der Induktionsmotor besteht im Wesentlichen aus zwei Hauptkomponenten, dem Stator und dem Rotor.
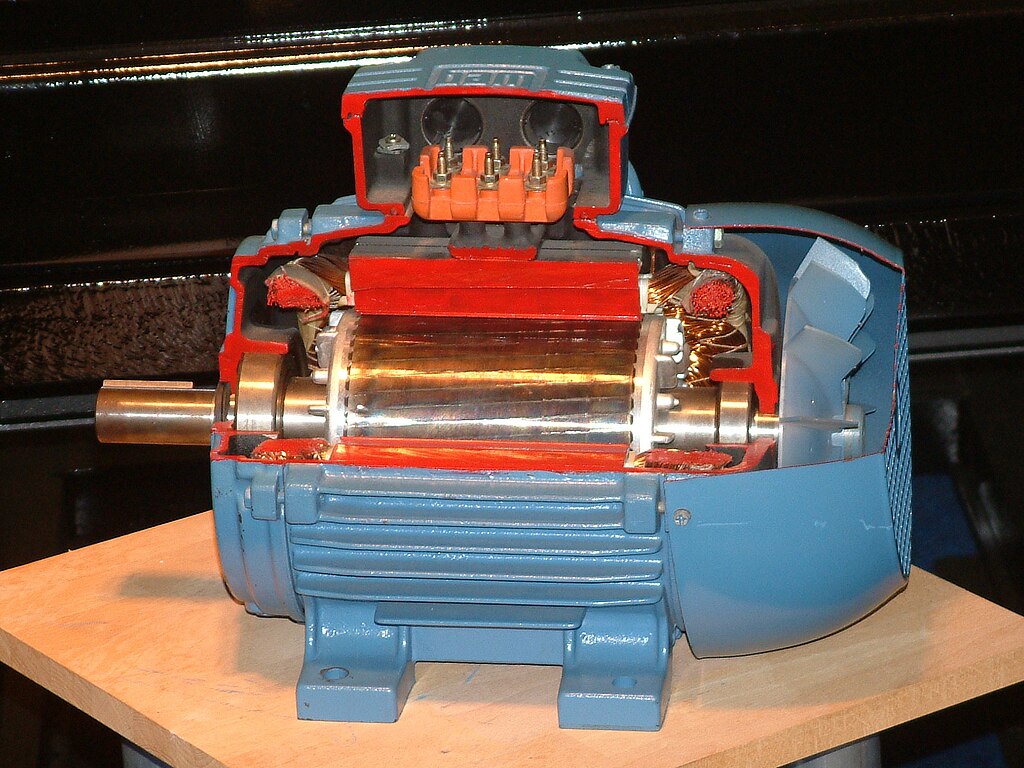
Das Bild zeigt ein Schnittmodell eines Induktionsmotors durch den Stator bis zum Rotor
Quelle: https://de.wikipedia.org/wiki/Drehstrom-Asynchronmaschine#/media/Datei:Cut-away_version_of_an_electric_motor_(2).JPG
Stator
Außen befindet sich der nicht bewegliche Stator (auch Ständer genannt). Er enthält die Wicklungen (Spulen) für die Stromphasen. Bei einem einphasigen Motor ist das dann nur eine Wicklung (hier sind jedoch zusätzliche Schaltungskomponenten erforderlich). Bei einem dreiphasigen Drehstrommotor sind es jeweils pro Phase eine Wicklung, die um 120° zueinander versetzt angebracht sind. Die Spulen befinden sich in den Nuten eines Dynamoblechpakets. Wenn durch diese Spulen nun der Wechselstrom fließt, entstehet ein rotierendes Magnetfeld.

Das Bild zeigt den um jeweils 120° zeitlich versetzten Verlauf der drei Spulenströme.

Durch die Spulenströme bildet sich ein zweipoliges Magnetfeld, das den Rotor in Bewegung versetzt.
Rotor
Im Inneren befindet sich der drehbare Rotor (auch Läufer genannt). Das äußere drehende Magnetfeld des Stators bewirkt durch elektromagnetische Induktion die Drehung des Rotors. Daher kommt der Name Induktionsmotor.
Die Drehgeschwindigkeit des Drehfeldes nennt man die Synchrondrehzahl. Die Drehgeschwindigkeit ist abhängig von der Netzfrequenz (50 Hz).
Dies bedeutet, dass sich der Motor 50 mal in der Sekunde dreht. Das entspricht 3000 Umdrehungen pro Minute.
Es ist auch möglich im Stator die Polpaarzahl, durch eine Erhöhung der verbauten Spulen zu erhöhen.
Dadurch sinkt die Drehzahl des Rotors gemäß der Formel:
Drehzahl = Frequenz/Polpaarzahl.
Bei einer Polpaarzahl von eins entspricht die Drehzahl der Netzfrequenz. Drehzahl = 50Hz/1.
Bei einer Polpaarzahl von zwei entspricht die Drehzahl der halben Netzfrequenz. Drehzahl = 50Hz/2 usw.
| Polpaarzahl (Nord-Süd) | Polzahl Nord, Süd | Anzahl Spulen | Winkel zwischen den Spulen |
|---|---|---|---|
| 1 | 2 | 3 | 120° |
| 2 | 4 | 6 | 60° |
| 3 | 6 | 9 | 40° |
| 4 | 8 | 12 | 30° |
| 5 | 10 | 15 | 24° |
Der Motor dreht sich immer mit einer kleineren Drehzahl als das Drehfeld. Es läuft also nicht direkt synchron mit dem Drehfeld, sondern asynchron. Daher kommt auch der Name Asynchronmotor. Die Differenz zwischen der Drehzahl des Drehfeldes und der geringeren Drehzahl des Motors wird Schlupf genannt. Die Drehzahl des Motors kann auch durch eine Änderung der Wechselspannungfrequenz gesteuert werden. Um diese Frequenz anzupassen wird ein Frequenzumrichter verwendet.
Anzeige
Unsere Buchtipps zur Elektrotechnik
Impressum | Datenschutz